Het jeukt al een tijdje maar een echte bouwer ben ik niet, wat moet je dan…
Materiaal bestellen en knutselen maar!
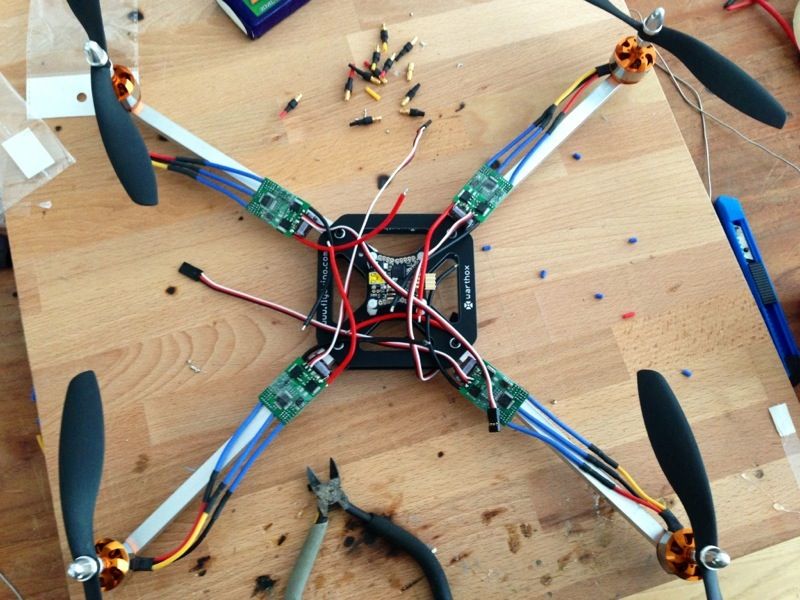
Zoals op de foto’s te zien is ben ik een multicopter (volksmond drone genoemd) aan het maken. Nu hoor ik de meesten al zeggen “is dat voor jou?”
Eigelijk gezegd is het ook niets voor mij… totdat ik een flight controler van flyduino tegen kwam. Deze werkt op het platform van multiWii, inderdaad die spelcomputer.
Deze flight controller moet zelf geprogrammeerd worden en daardoor is onder ander 3D vliegen mogelijk!
Binnenkort meer over de software én flashe van de ESC’s (wat?)
Genoeg leuks om over te schrijven dus.
Gaatjes boren:

Al het materiaal:

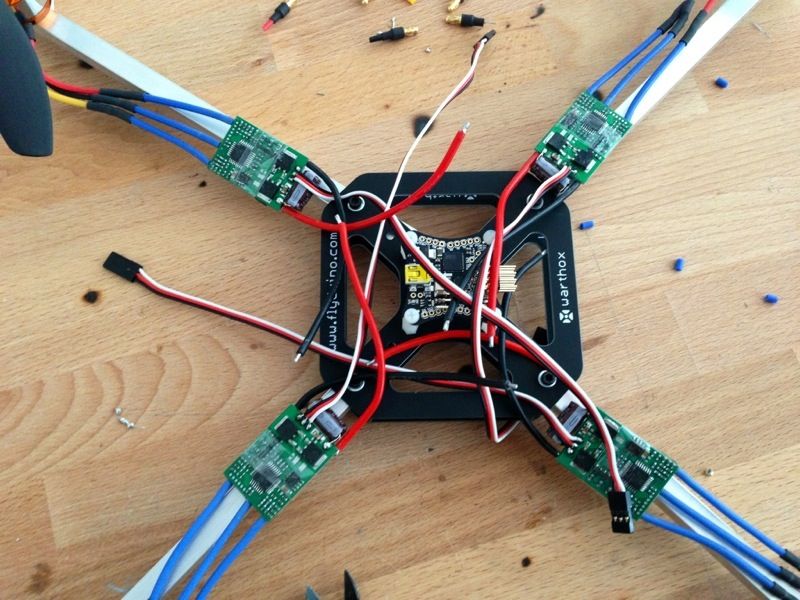
Kunststof boutjes. Met deze afstandsbusjes is het mogelijk om ‘etages’ te bouwen om de flight controller te kunnen uitbreiden.

Nadeel is wel dat er 4 motoren moeten komen.



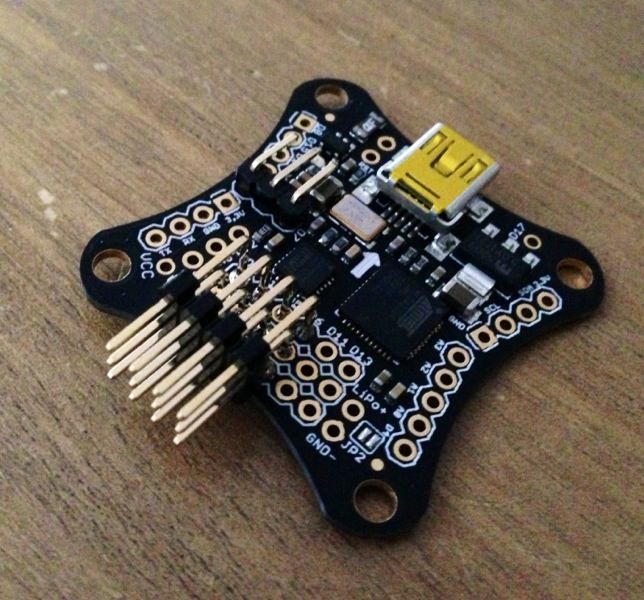
De NanoWii





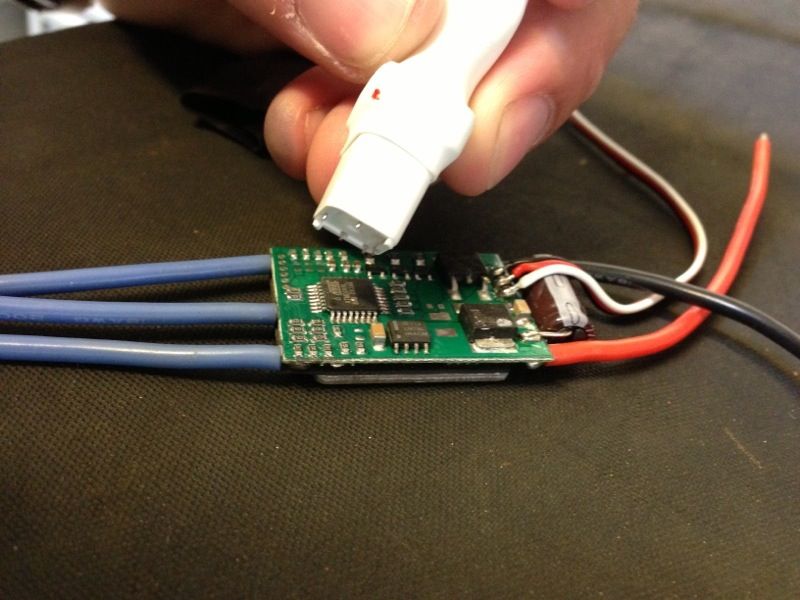
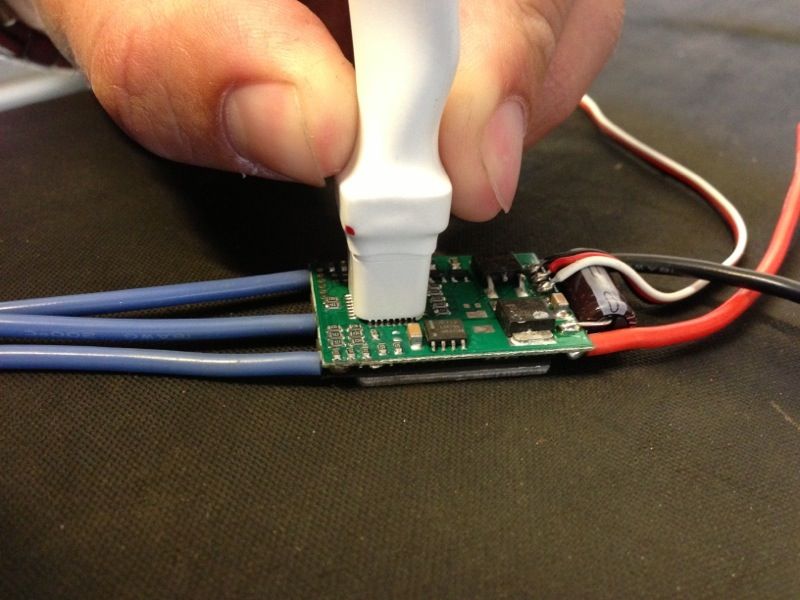
Zo de 4 ESC zijn alvast aan de motors gesoldeerd:
Ook heb ik connectie met het board kunnen krijgen.

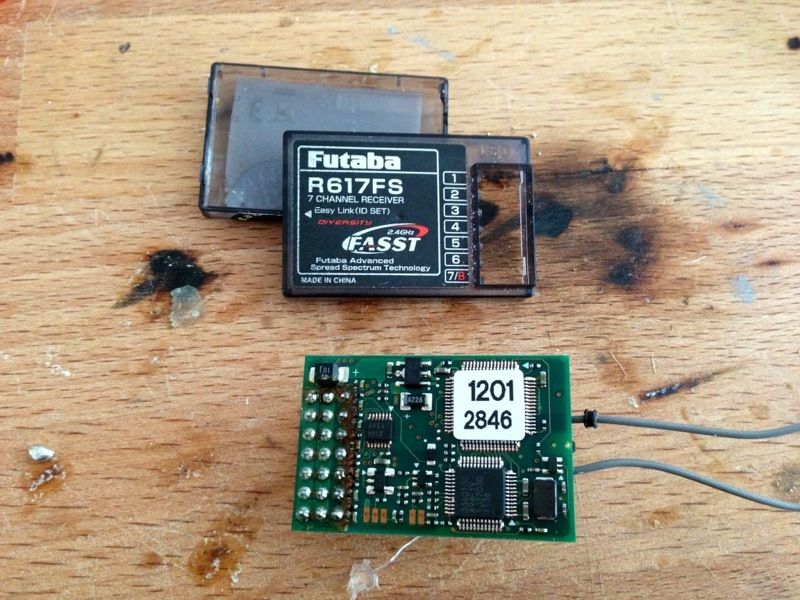
Ontvanger
Het project loopt geslaagd en er kan begonnen worden met de software maar eerst de ontvanger. Omdat in de software de eindpunten moeten worden opgenomen is het van belang dat de ontvanger kan worden aangesloten.
Het KISS (Keep It Simple, stupid!) vind ik erg belangrijk en wil daarom zo weinig mogelijk bedrading hebben.
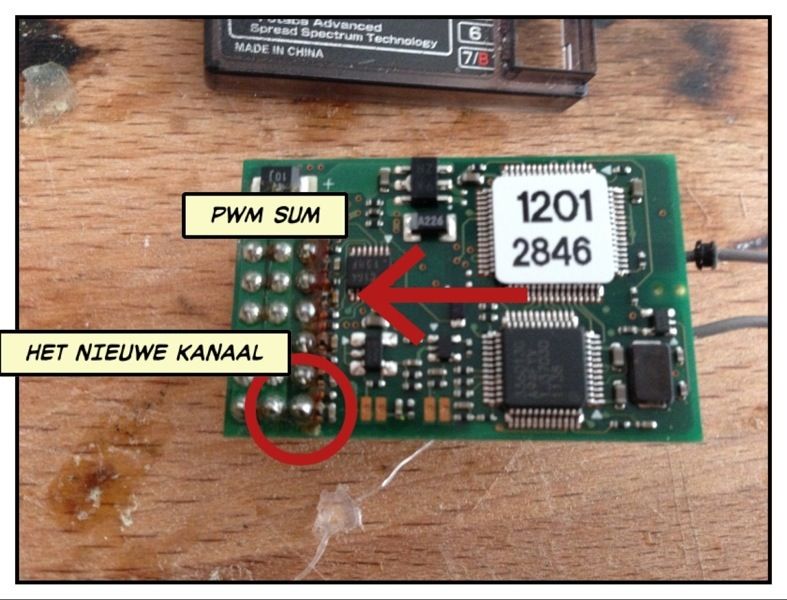
Im dit te realiseren maak ik op een bestaande ontvanger een ‘PWM SUM’
signaal. Dit staat voor ‘Pulse Width Modulation Summary’ Je kunt dit zien als het Futaba SBUS systeem. (Er zijn ontvangers die een extra poort hebben met dit ‘PWM SUM’ signaal maar die heb ik niet)
Tussen de ontvanger en het flight board zit dus maar een kabeltje.
Alleen twee SMD weerstanden verwijderen en een draadje toevoegen.
Er zijn twee PWM SUM punter op de ontvanger. Ik neem het punt waar ik het makkelijkste bij kon om te solderen.

Meer info over PWM SUM kun je hier vinden.
hij vliegt!

Sommige hebben hem al zien vliegen en om eerlijk te zijn ben ik best tevreden (tot nu toe)
Het volgende onderdeel komt nu aan bod, het flashe.
Flashe is het veranderen van firmware (software) van wen microprocessor. Elke ESC heeft z’n processor als stuur eenheid aan boord. Om een motor te kunnen laten draaien is software nodig.
Deze software is eigelijk een beetje rauw… Dat wil zeggen, voor iedereen geschikt.
De meeste regelaars werken z’n 8000x per seconde en dat is eigelijk ook wel goed. (Bij een vliegtuig denk ik meestal niet veel sneller haha)
Een quad heeft een snellere processor aan boord wat zeker nodig is om hem stabiel te houden. Helaas kan deze tot z’n 400.000x per seconde zijn proces analyseren. Het is dan ook voor de hand liggend dat je ESC ook die zelfde snelheid haalt, daarom flashe (onder andere) een ESC met andere firmware.